

Parkiranje bez vozača (AVP) samo je jedna od nekoliko funkcija autonomnog parkiranja koje su trenutno u razvoju ili su već na tržištu. Ono što im je svima zajedničko jest da vozaču donose veću udobnost i sigurnost. Stresni i dugotrajni manevri parkiranja sada su stvar prošlosti
Samostalno parkiranje ili na engleskom self-parking je bilo jučer. Tako bar kaže velika njemačka multinacionalka Contnental, koju mnogi ponajprije poznaju zbog njihovih guma za vozila. No njihove aktivnosti, kad je riječ o rješenjima u autoindustriji, veliki je dio njihovog portfelja proizvoda i usluga.
Parkiranje bez vozača, također poznato kao automatizirano parkiranje vozila (automated valet parking - AVP), samo je jedna od nekoliko funkcija autonomnog parkiranja koje su trenutno u razvoju ili su već na tržištu. Ono što im je svima zajedničko jest da vozaču donose veću udobnost i sigurnost. Stresni i dugotrajni manevri parkiranja sada su stvar prošlosti.
Istovremeno se mogu izbjeći manje nesreće pri manevriranju u složenim i zbunjujućim situacijama, jer te nesreće pri parkiranju također mogu brzo rezultirati visokim troškovima. Autonomna vozila također se mogu parkirati bliže jedno drugom, što omogućuje više parkirnih mjesta. To je velika prednost, posebno u velegradovima, gdje su parkirna mjesta vrlo rijetka i skupa. Korist od AVP-a imaju vozači kao i operateri garaža kojima se otvaraju novi poslovni modeli. No, uporaba u tvornicama i logističkim centrima također se koristi za parkiranje bez vozača.
vezane vijesti
-
![[FOTO/VIDEO] Parkiranje jednom papučicom: Renaultov sustav automatizira sve parkirne manevre]()
[FOTO/VIDEO] Parkiranje jednom papučicom: Renaultov sustav automatizira sve parkirne manevre
-
![Klima, ventilacija, prozori, parkiranje...: Donosimo praktične savjete za vožnju po paklenim vrućinama]()
Klima, ventilacija, prozori, parkiranje...: Donosimo praktične savjete za vožnju po paklenim vrućinama
-
![Automatizirano parkiranje u garažama; Ford, Bedrock i Bosch testiraju visoku tehnologiju koja olakšava parkiranje]()
Automatizirano parkiranje u garažama; Ford, Bedrock i Bosch testiraju visoku tehnologiju koja olakšava parkiranje
![[FOTO/VIDEO] Parkiranje jednom papučicom: Renaultov sustav automatizira sve parkirne manevre](/media/thumbnail/500x300/1574829.jpeg?cropId=0)


Continental nudi dva pristupa automatiziranom parkiranju vozila (AVP): inteligentno vozilo (AVP tip 1) i inteligentnu infrastrukturu (AVP tip 2).
Inteligentno vozilo (AVP tip 1)
U sustavu tipa 1 inteligencija, uključujući sve senzore, računalne jedinice i algoritme, nalazi se u vozilu, dok je u sustavu tipa 2 inteligencija, uključujući senzore i sustav upravljanja AVP-om, smještena u odgovarajućoj infrastrukturi. Dok je AVP tip 1 u razvoju, plan je pokrenuti AVP tip 2 ove 2024. godine.
Continental radi na sustavu AVP tipa 1 kao proširenju funkcija potpomognute vožnje. Budući da postoji trend veće automatizacije vozila u cijeloj automobilskoj industriji, buduća vozila će biti opremljena sa znatno više ekoloških senzora i računalnih jedinica, što je osnovni zahtjev za AVP tipa 1. Sa svojim opsežnim znanjem i iskustvom, Continental nudi rješenja koja obuhvaćaju cijeli opskrbni lanac za najrazličitije izazove koji se mogu pojaviti u parkiranju vozila. Od fleksibilne navigacije oko stacionarnih objekata i automatizirane interakcije s barijerama do prilaza u parkirnim garažama na više razina.
Automated Valet Parking Type 2 (AVP tip 2)
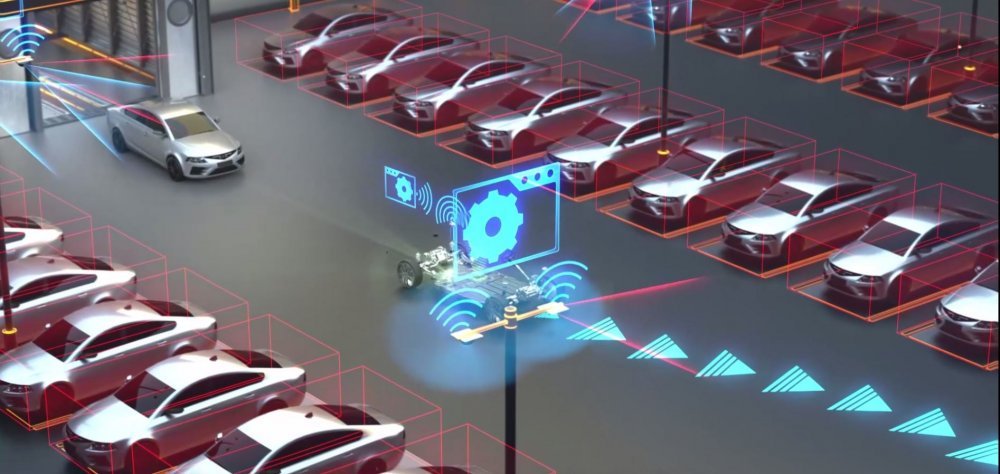
U sustavu tipa 2, inteligencija, uključujući senzore i AVP sustav upravljanja, nalazi se u odgovarajućoj infrastrukturi. Rješenje se može integrirati u različite infrastrukturne sustave i nudi dva slučaja upotrebe. Prvi se odnosi na autonomno manevriranje (Infrastructure Orchestrated Maneuvering, IOM), primjerice, novoproizvedenim vozilima kod proizvođača vozila ili u logističkim područjima, dok je drugi slučaj automatizirano parkiranje (Automated Valet Parking tip 2) u parkirnim garažama.

Princip je jednostavan: vozilo se putem aplikacije predaje inteligentnom infrastrukturnom sustavu i automatski ga parkira. Ako je potrebno, vozilo se također može pozvati putem aplikacije i potom preuzeti na unaprijed određenom izlazu. Vozilo automatski izbjegava prepreke i pronalazi alternativne rute oko njih. Ostali slučajevi upotrebe uključuju kraj proizvodne linije. Ovdje se vozilo preuzima i autonomno navigira do parkirnog mjesta. Drugi primjer je na ulazu u hotel ili zračnu luku. I ovdje se vozilo parkira na ulazu, a potom se autonomno parkira.
Uz pomoć kamera ugrađenih u infrastrukturu, inteligentni algoritam obrađuje podatke senzora u središnjem kontrolnom sustavu i radijski koordinira kretanje vozila. Integrirano je prepoznavanje objekata temeljeno na infrastrukturi, dinamičko planiranje rute, kočenje u nuždi i druge funkcije.





























